
We are thrilled to announce that Prof. Kazuhiro Kosuge in the Department of Electrical and Electronic Engineering at The University of Hong Kong (HKU), and his innovative research teams have won multiple awards in 2024 for their outstanding projects. Their dedication to excellence and tireless efforts have not gone unnoticed. Please join us in congratulating them on this remarkable achievement!
Project (1): Passive Actuator-Less (PAL) Gripper for Fabric Picking
Team Members:
Dr. Akira SEINO (Research Officer, TransGP), Prof. Kazuhiro KOSUGE (Chair Professor of Robotic Systems of HKU-EEE, Deputy Managing Director, TransGP), Dr. Hoi Pang NG (Chief Operating Officer, TransGP)
Awards:
- Gold Medal at The 9th International Invention Innovation Competition in Canada
- Silver Medal at Geneva International Exhibition of Inventions 2024
- Special Awards by Highly Innovative and Unique Foundation (HIUF), Saudi Arabia at The 9th International Invention Innovation Competition in Canada
- Special Awards by Innovation Initiative Co-operative Inc. “The Inventors Circle” – Toronto, Canada at The 9th International Invention Innovation Competition in Canada
Project Description:
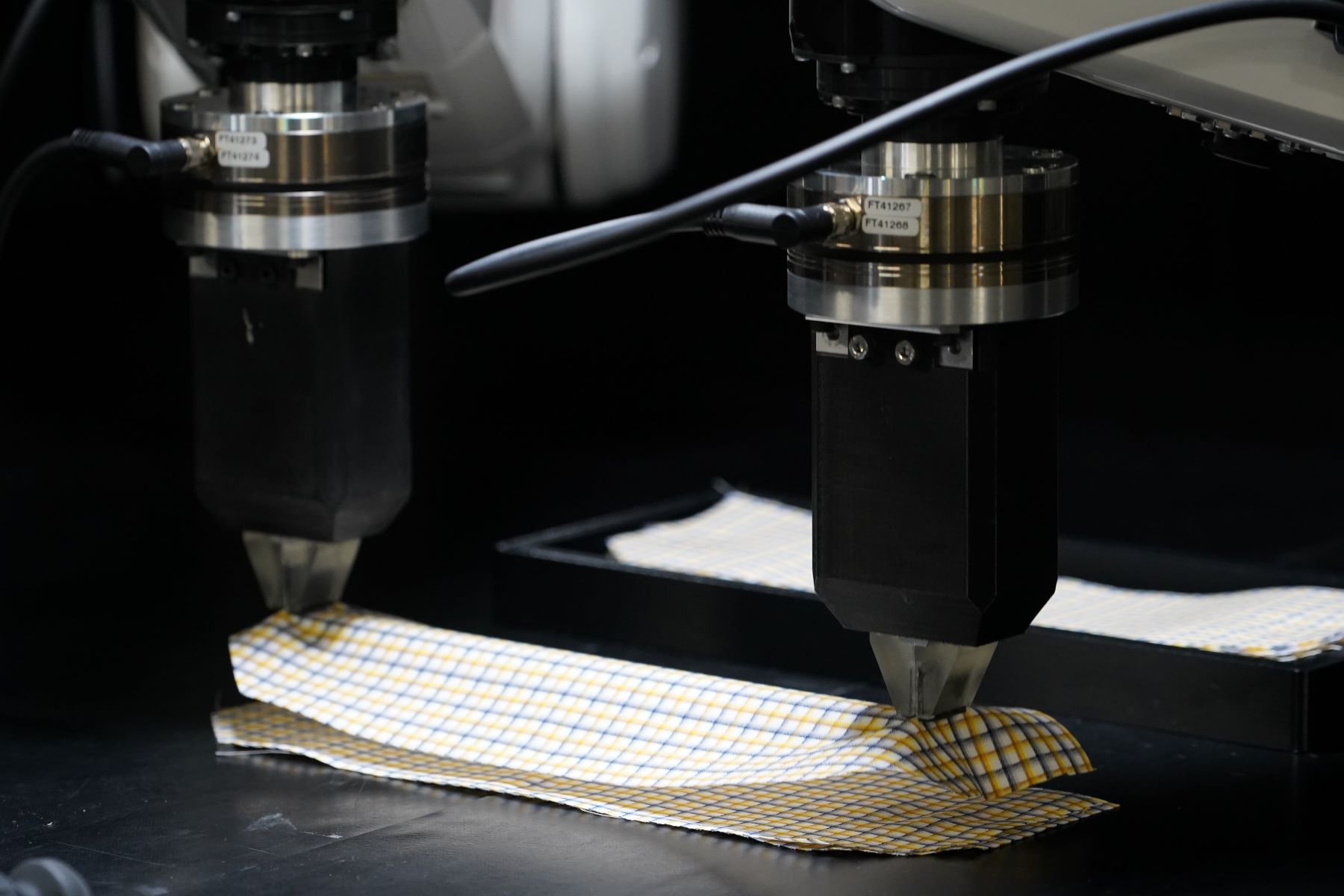
The invention is a passive gripper for fabric handling in the garment industry, eliminating the need for electric or pneumatic actuators. The gripper features a housing, two movable fingers, a locking device, and a bias device, allowing it to switch between clamping and releasing states through a simple push mechanism. This design simplifies operations, reduces operating costs, and enhances automation efficiency. The passive gripper can be integrated into fabric manipulating systems, facilitating precise and cost-effective fabric handling for improved production processes.

^Left to right: Prof. Kazuhiro Kosuge and Dr. Akira SEINO (Research Officer, TransGP)
View More: https://www.palgrip.com
(Please note that we created a spin-off and included this technology in the company, it’s not exactly a product website.)
Project (2): Smart Fixture-free 2D Sewing System with Automatic Fabric Alignment
Team Members:
Prof. Kazuhiro KOSUGE (Chair Professor of Robotic Systems of HKU-EEE, Deputy Managing Director, TransGP), Dr. Fuyuki TOKUDA (Research Officer, TransGP)
Awards:
- Gold Medal at The 9th International Invention Innovation Competition in Canada
- Silver Medal at Geneva International Exhibition of Inventions 2024
- Special Awards by Inventors College Organization (ICO) – Toronto, Canada at The 9th International Invention Innovation Competition in Canada
- The Organizer’s Choice Awards at The 9th International Invention Innovation Competition in Canada
Project Description:
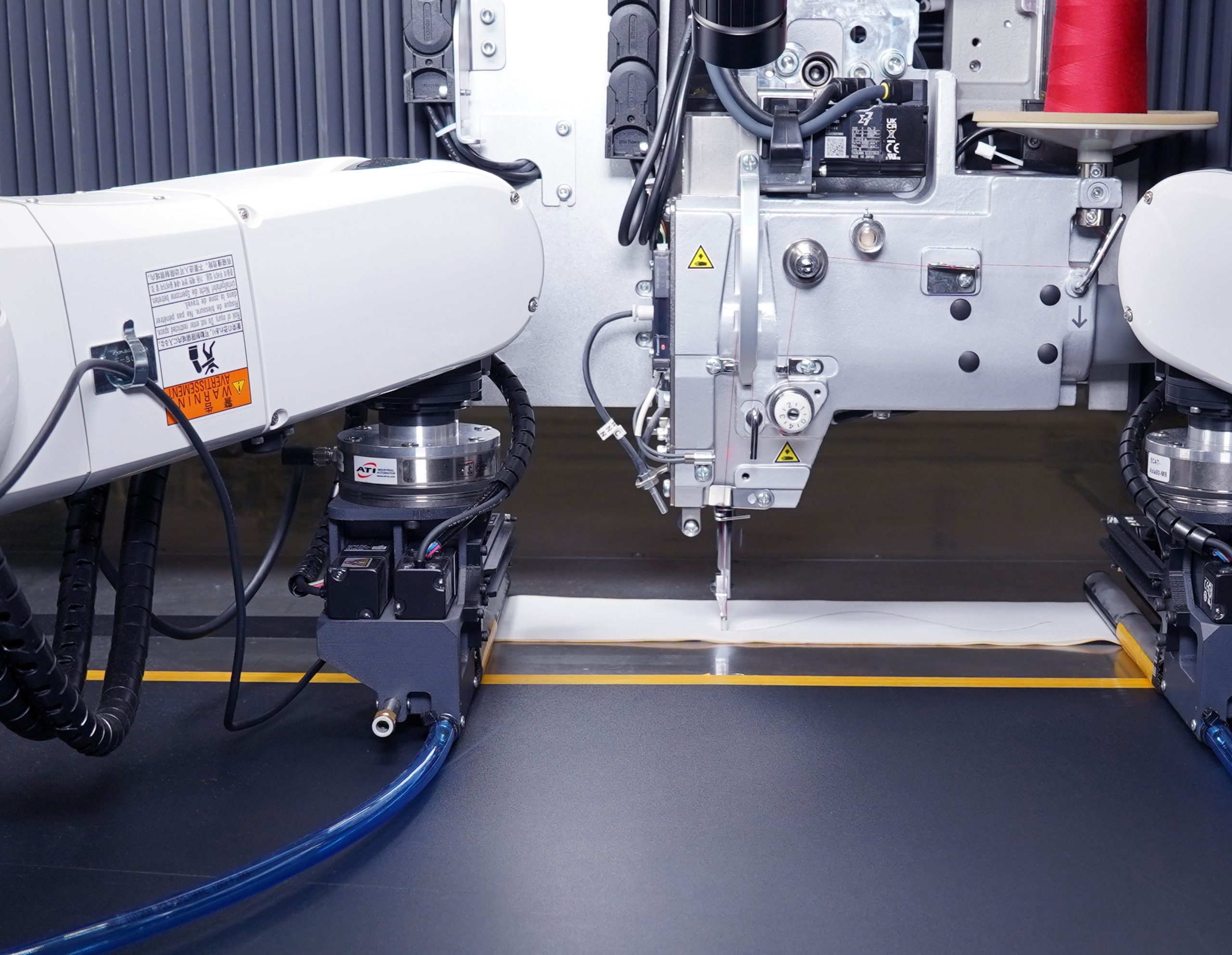
The invention is an automated robotic sewing system addressing manual labor shortages and the need for custom fixtures for sewing operation. It features dual manipulators with force/torque sensors, a vision module for seam line tracking, and wrinkle removal. The system performs precise fabric manipulation and sewing along both visible and virtual sewing lines without fixtures, enhancing efficiency and adaptability in garment manufacturing.

^Left to right: Dr. Akinari KOBAYASHI (Research Officer, TransGP), Prof. Kazuhiro Kosuge and Dr. Fuyuki TOKUDA (Research Officer, TransGP)
View More: https://www.sewingdx.com
(Please note that we created a spin-off and included this technology in the company, it’s not exactly a product website.)
Project (3): Accupick – Robotic Fabric Handling System: Pick-and-Place from Fabric Stack
Team Members:
Prof. Kazuhiro KOSUGE (Chair Professor of Robotic Systems of HKU-EEE, Deputy Managing Director, TransGP), Dr. Akinari KOBAYASHI (Research Officer, TransGP)
Awards:
- Silver Medal at Geneva International Exhibition of Inventions 2024 (Note: we combined this technology and project 2 as 1 entry in the Geneva Exhibition)
- Silver Medal at The 9th International Invention Innovation Competition in Canada
- Special Awards by Eurobusiness-Haller & Haller Pro Inventio Foundation – Poland at The 9th International Invention Innovation Competition in Canada
Project Description:
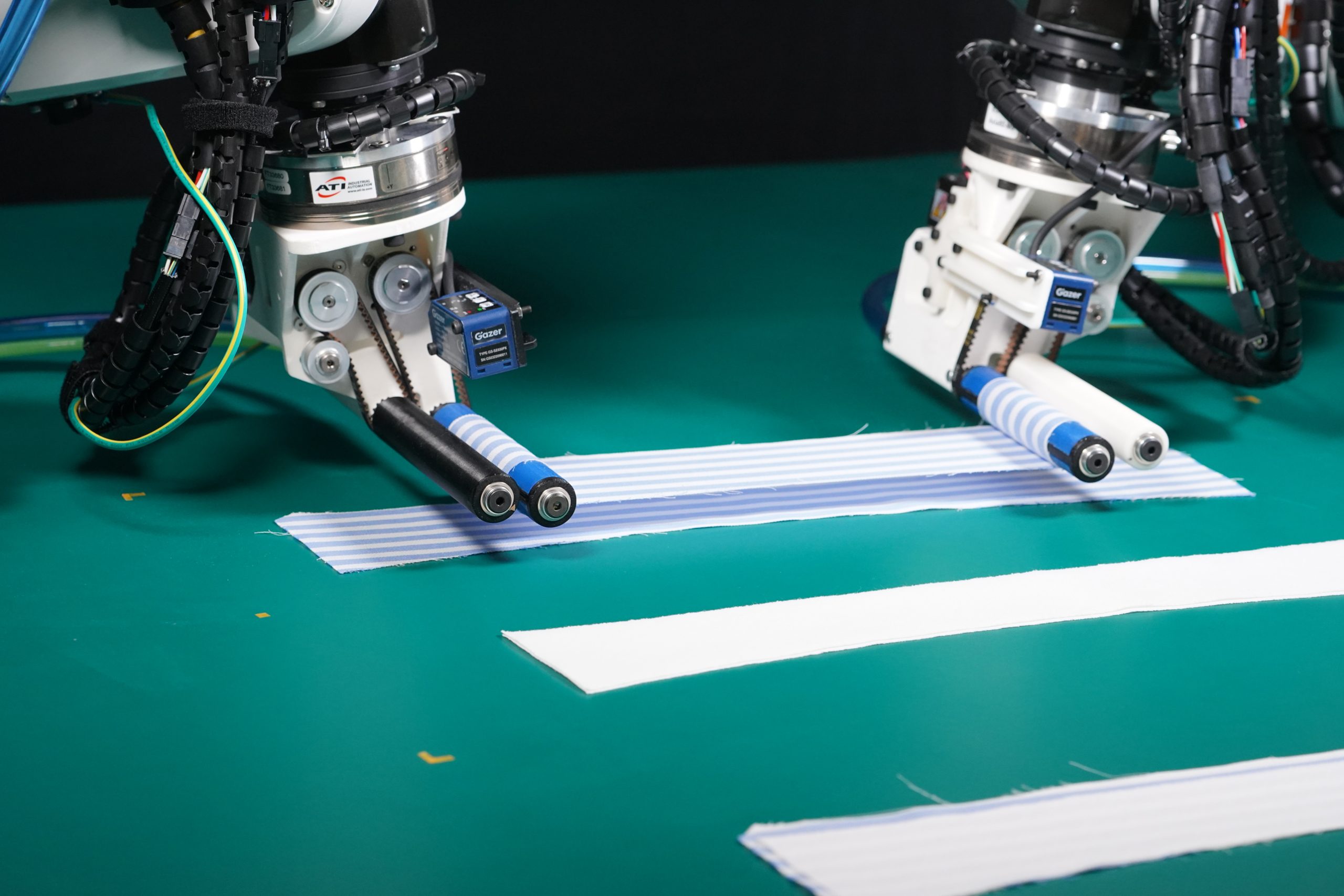
The invention presents a fabric handling manipulator system capable of managing diverse fabric sizes and shapes from a fabric stack. Featuring dual robot manipulators with rolling-up end-effectors and force sensors, and a vision sensor system, it ensures precise Pick-and-Place fabric manipulation. This system enhances garment production efficiency by automating tasks traditionally performed manually, offering flexibility and high-quality results. Its innovative design and simple mechanical structure reduce production costs and streamline operations, making it an ideal solution for modernizing textile manufacturing processes.
View More: https://www.sewingdx.com
(Please note that we created a spin-off and included this technology in the company, it’s not exactly a product website.)