An engineering research team from the Department of Electrical and Electronic Engineering (EEE) at The University of Hong Kong (HKU), led by Professor Feifei Wang, has made a pioneering advance in visual feedback for nanorobot manipulation in vivo. Their study, titled “Real-Time Near-Infrared II Fluorescence Navigation of Magnetic Nanorobots for Image-Guided Therapy,” was recently published in Science Advances.
Nanorobots have demonstrated promising potential for precision medicine over the past few decades. However, real-time visual feedback for the precise locomotion of nanorobots in complex physiological environments remains challenging, especially for imaging modalities that require long exposures to detect ionising radiation or that suffer from strong scattering in living tissues.
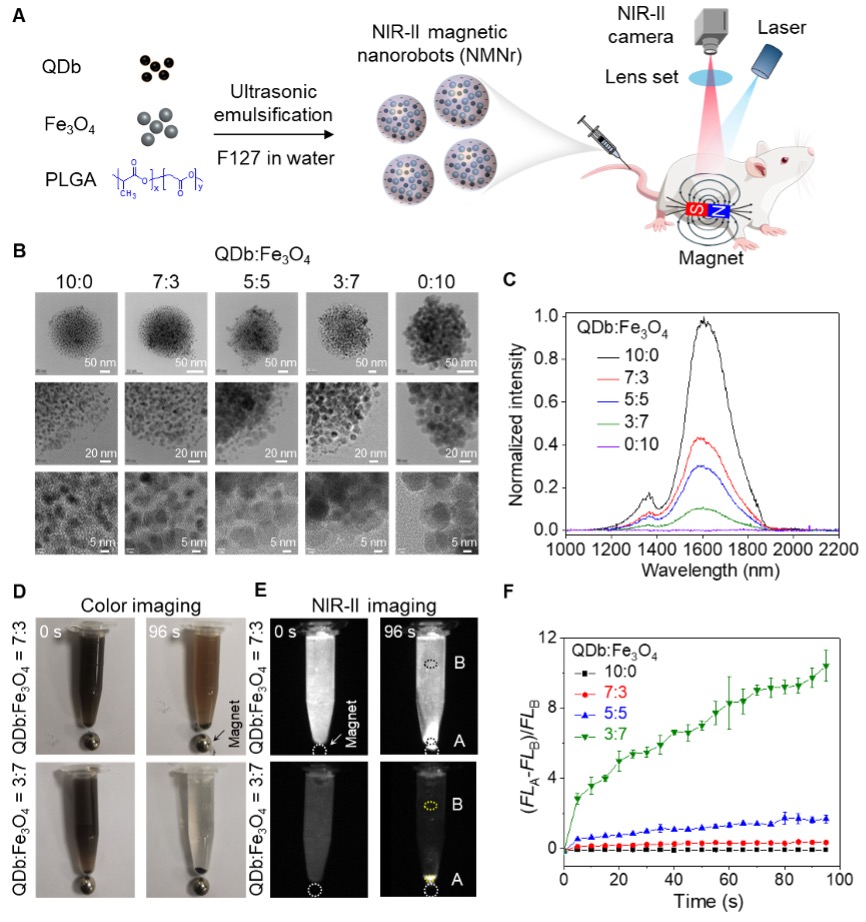
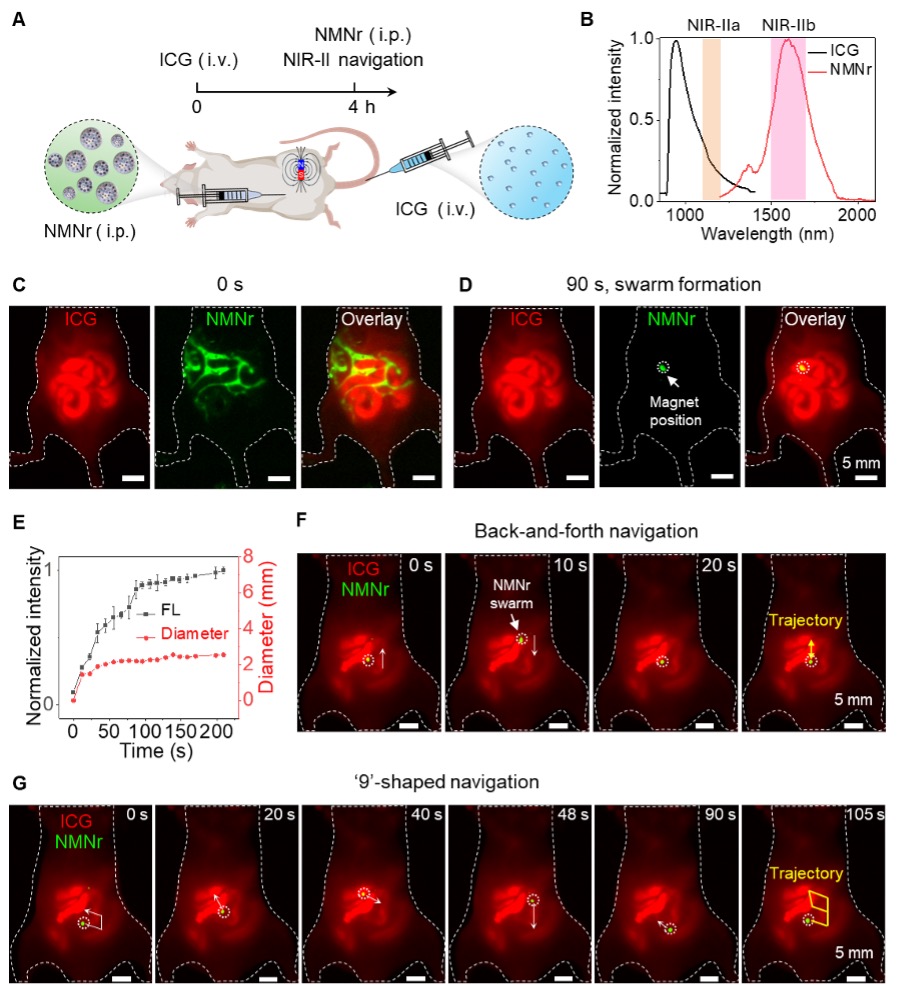
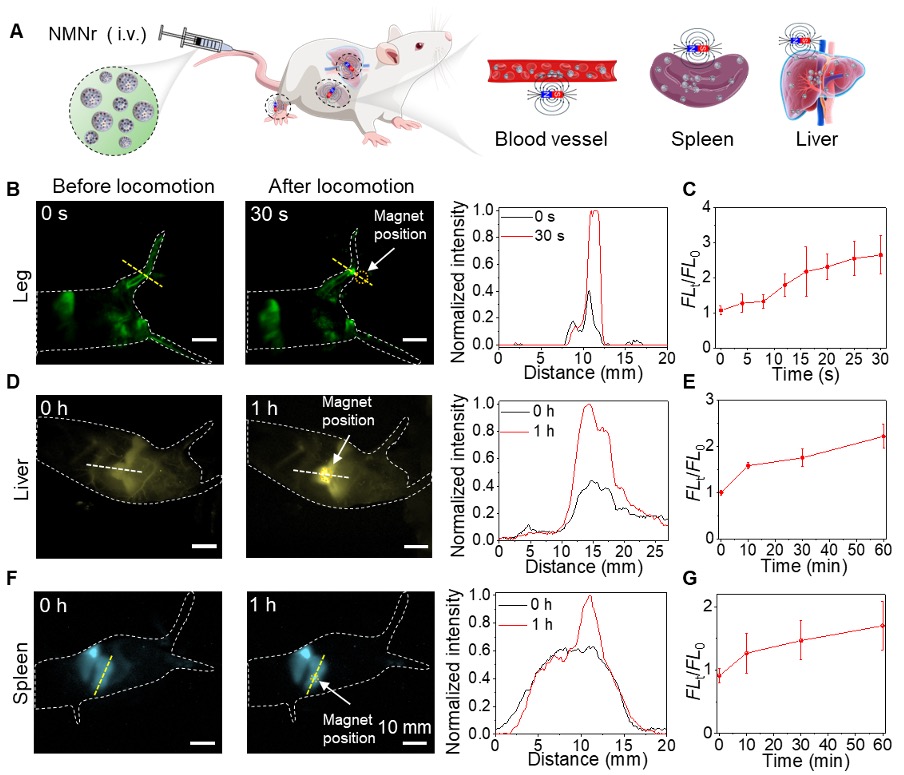
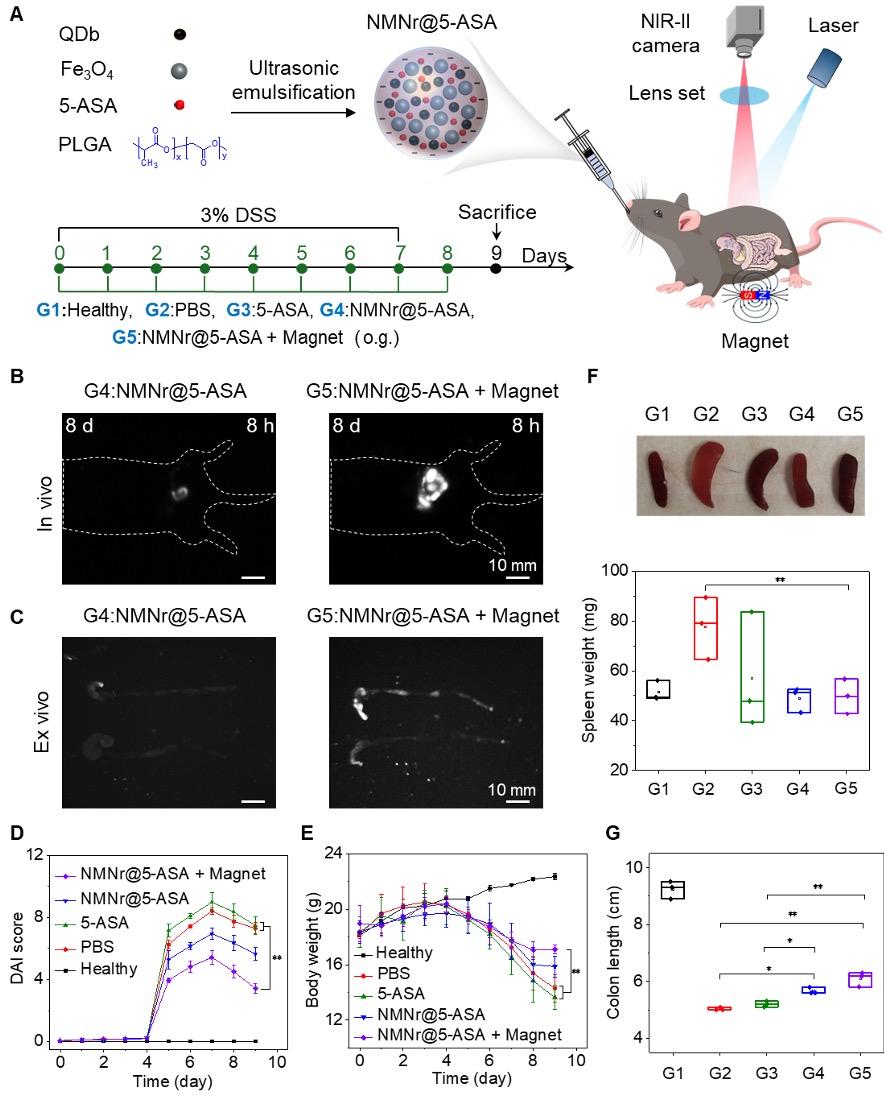
Prof. Wang’s team reported the application of near-infrared II (NIR-II, 1000–3000 nm) fluorescence imaging to achieve precise, noninvasive locomotion and delivery of nanorobots within living organs and tissues, with high spatiotemporal resolution, specificity, and sensitivity. Reduced light scattering and diminished tissue autofluorescence in the NIR-II window, combined with the optimised magnetic performance of the nanorobots, enable unprecedented visual clarity, faster locomotion, and improved delivery rates in living mammals.

^Prof. Feifei Wang, Assistant Professor at the Department of Electrical and Electronic Engineering.
Article Title:
Real-Time Near-Infrared II Fluorescence Navigation of Magnetic Nanorobots for Image-Guided Therapy
Abstract:
Real-time navigation of nanorobots with high spatiotemporal resolution and molecular contrast in deep tissues via non-invasive manners has been challenging. Here, we developed near-infrared II (NIR-II, 1000-3000 nm) magnetic nanorobots that balance fluorescence brightness at ~ 1600 nm with magnetic strength, facilitating precise gathering or locomotion of the nanorobots in the peritoneal cavity, hindlimb, liver, spleen and lower gastrointestinal tract of live mice under real-time NIR-II imaging guidance with high resolution and sensitivity. Two-plex NIR-II imaging enabled precise locomotion by simultaneously providing real-time information on both the location of nanorobots and the position of target sites with molecular specificity. NIR-II magnetic nanorobots remained stable in gastric juice simulated solution (pH = 2) for over two weeks. The magnetic locomotion of nanorobots loaded with 5-aminosalicylic acid under NIR-II visual feedback enables targeted delivery to the lower gastrointestinal tract and effectively enhances therapeutic efficacy in mice with inflammatory bowel disease. This platform opens an avenue in precision medicine.
Article in Science Advances: https://www.science.org/doi/10.1126/sciadv.aea5126
Wang Lab @ HKU (Research Group Website): https://ece.hku.hk/~ffwang